
Hello,
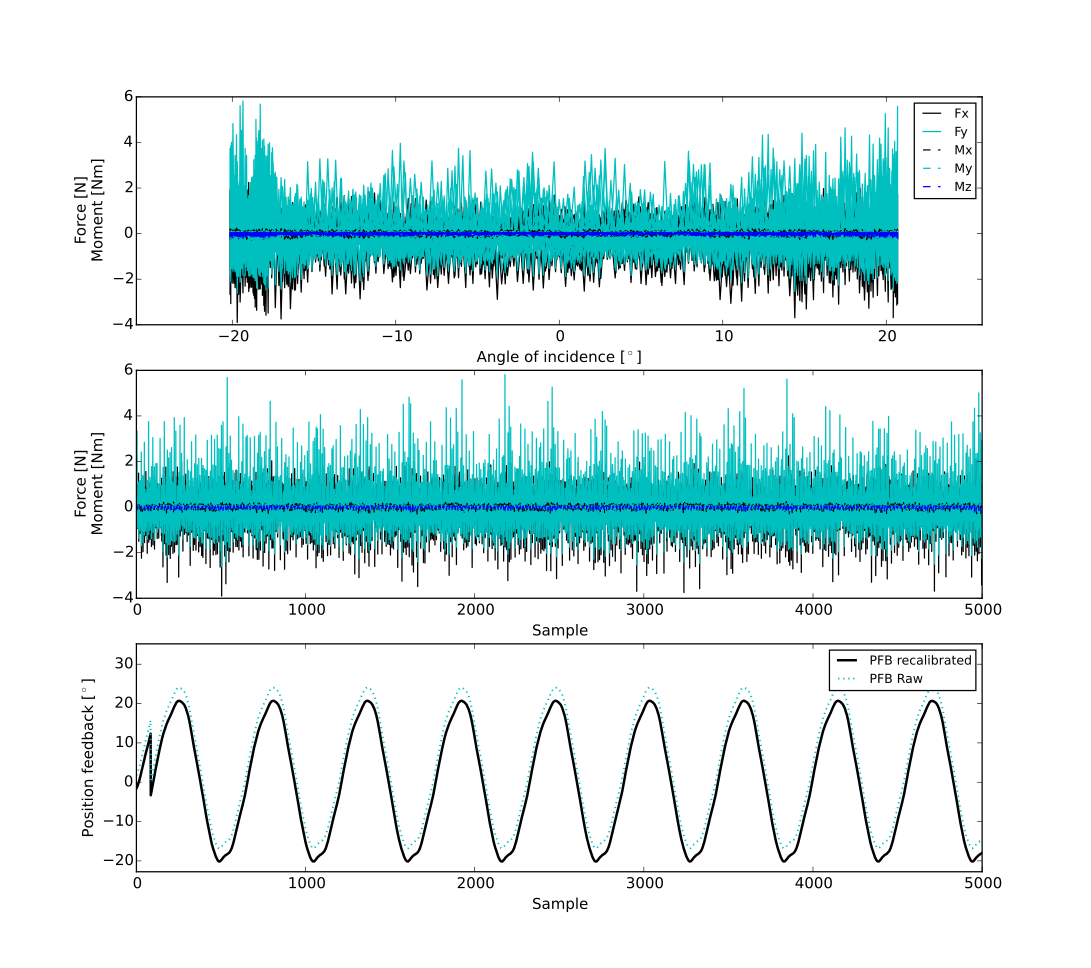
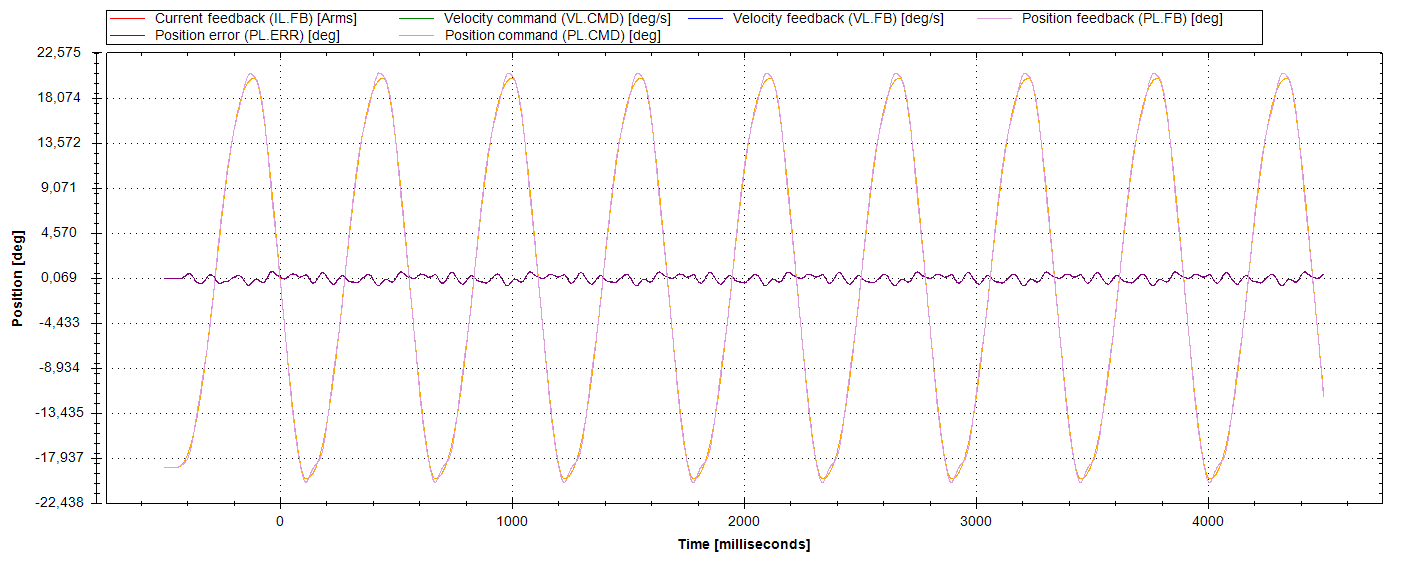
I'm very sorry to bother you again. I figured out that my quadrature curve is shifted in motion angle. The shift is arbitrary and occurs every time. The values should oscillate between -20 to 20 but indeed they vary between i.a. -25 and 15, or -12 and 28. The z-signal resets the zero after some samples, but not to 0 as it should? (See attached picture of the retrievd data from the LJ T7 DAQLJ.png) I can follow the curve with drive manufacturers software solution. I have attached a plot of the values of the drive manufacturer's scope (workBenchKollmorgen.png).
I use stream mode and configured the LJ Board, for A,B and Z-signals with the following script lines following the documentation:
# Configure the quadrature digital input coming from the AKD
# Digital input 6 for signal A of enc
fioA = "DIO6"
fioB = "DIO7" #Digital input for signal B of enc
# Configures the counter
ljm.eWriteName(self.handle, fioA+"_EF_ENABLE", 0) # shut off input sigA
ljm.eWriteName(self.handle, fioB+"_EF_ENABLE", 0) # shut off input sigB
# activate quad mode & define input 6 as A signal
ljm.eWriteName(self.handle, fioA+"_EF_INDEX", 10)
# activate quad mode & define input 7 as B signal
ljm.eWriteName(self.handle, fioB+"_EF_INDEX", 10)
ljm.eWriteName(self.handle, fioA+"_EF_ENABLE", 1) # enable input 6
ljm.eWriteName(self.handle, fioB+"_EF_ENABLE", 1) # enable input 7
ljm.eWriteName(self.handle, fioA+"_EF_CONFIG_A", 1) # enabling z-phase
ljm.eWriteName(self.handle, fioA+"_EF_CONFIG_B", 5) # Z-phase DIO number
ljm.eWriteName(self.handle, fioB+"_EF_CONFIG_A", 1) # enabling z-phase
ljm.eWriteName(self.handle, fioB+"_EF_CONFIG_B", 5) # Z-phase DIO number
I verified that the error occurs both with eRead() and eStream() method, reading only a single quad signal or multiple ports in a list. I checked the quad signal with an oscilloscope to verify the z-signal:
-> Z signal comes reliable and in time, 5V, triangle pulse 400us
I wrote a routine to catch the shift error by setting an offsetValue. But this is no satisfying solution.
Any hints? Thank you very much in advance.

.png%3Fitok=PHGBxf6M "EEV Blog Reviews LabJack T7-Pro & Software Tools")


.jpg%3Fitok=B1YcuDFK)
.png%3Fitok=Ybt-OlgU "LabJack + JEDI One Can Create a Powerful Distributed DAQ Ecosystem")
{kind=link}
{kind=link}
My best guess is that there are some pulses coming in after the z-phase. We have had customers solve similar issues by being careful about backlash in their machine. Slowing down before coming to a complete stop can help. Try using the oscilloscope set to trigger on z-phase and read one of the quadrature lines as well. Then zoom out the time scan a bit. With a little luck that will give us a clue.
Hello,
thank you for the reply.
Point is, that I do never stop at 0 deg. Indeed at 0 deg the motor is at the fastest point in the oscillation motion. So, A and B have to give a signal with Z as well? Or didn't I understand your point?
What I did, to solve the problem is to start the measurement with standing machine turned to 0 deg and then start the oscillation after the aquisition without reading the Z signal. This seems to work. However I won't capture in this case if a count is lost and so error will raise with each pulse which was not counted.
Is there another way to do?
Thank you
"So, A and B have to give a signal with Z as well?"
That's right. The z-phase is not detected, rather it is checked when an edge on A or B is detected.